Collaborative Control Design for a Drone Swarm
Researcher - Robotics and Intelligent Systems Control. Abu Dhabi, UAE.
Aug 2019 - May 2020
Abstract
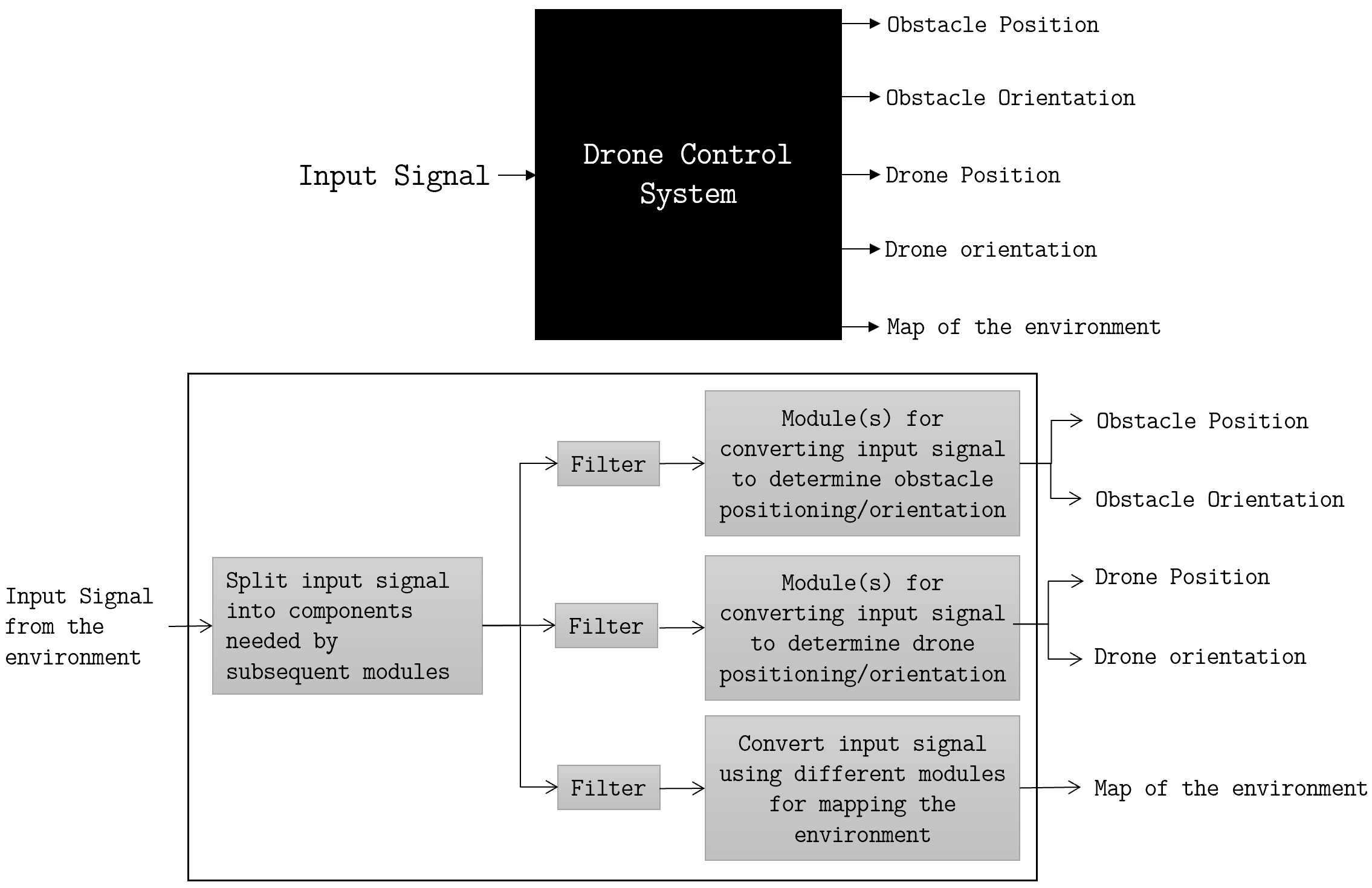
Simultaneous localization and mapping (SLAM) allows a drone to navigate and perceive its surrounding environment. In the past, drone systems have employed many technologies to perform relative localization, including various motion detection systems. With the reduced cost of high-resolution cameras and increased computational capabilities of on-board computers, computer vision techniques are now being investigated as additive sensors to inertial measurement unit systems.
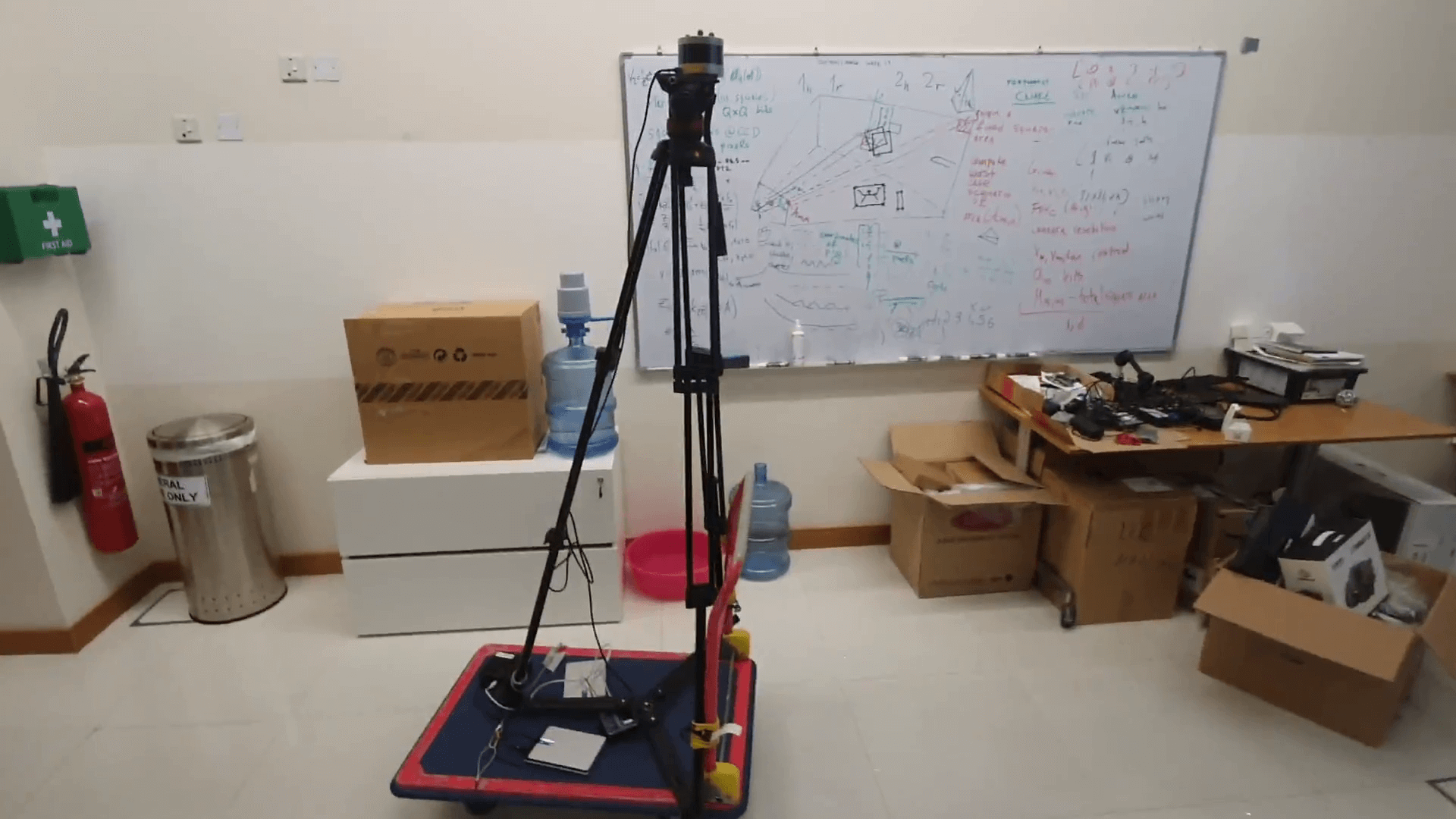
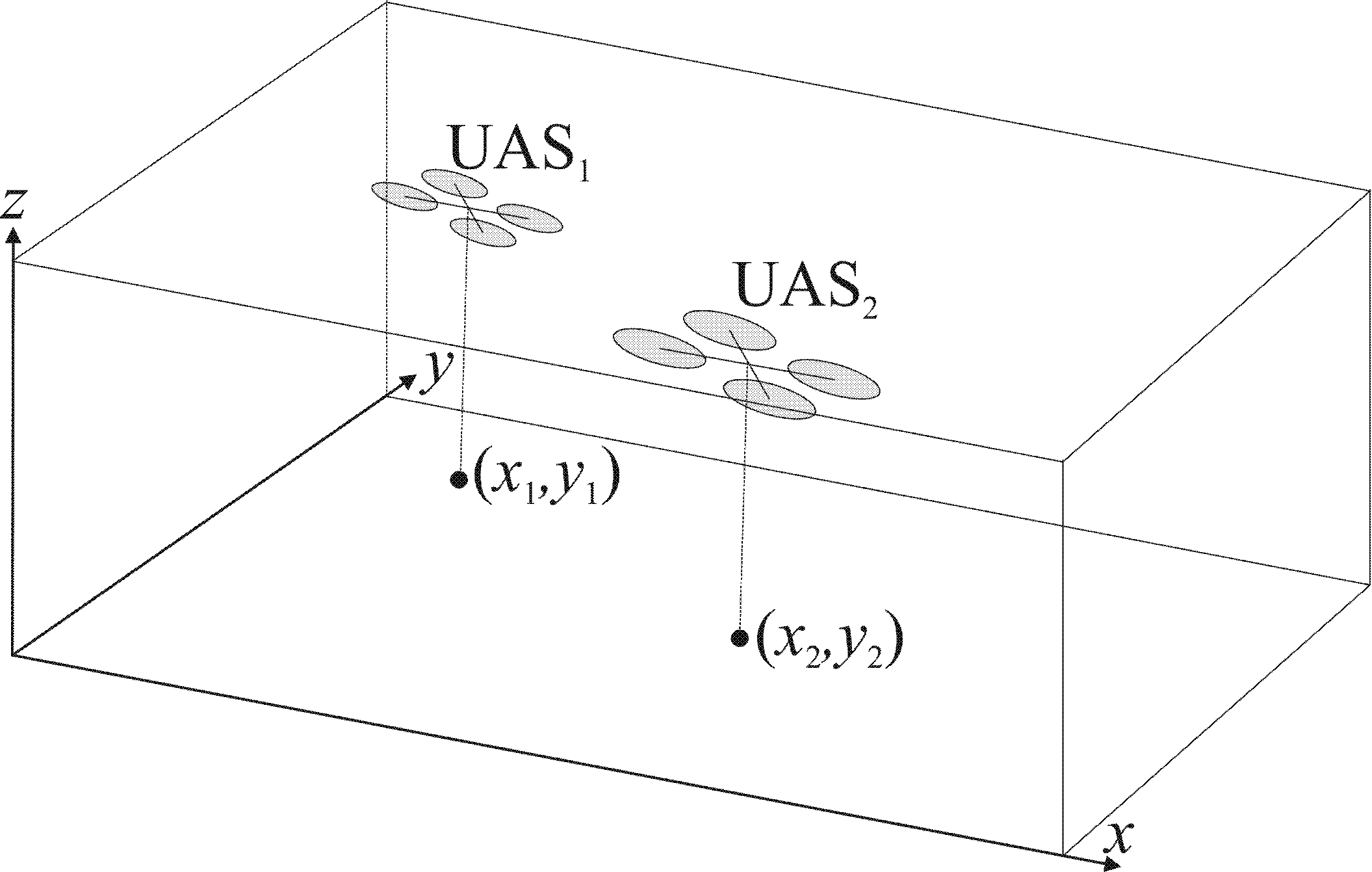
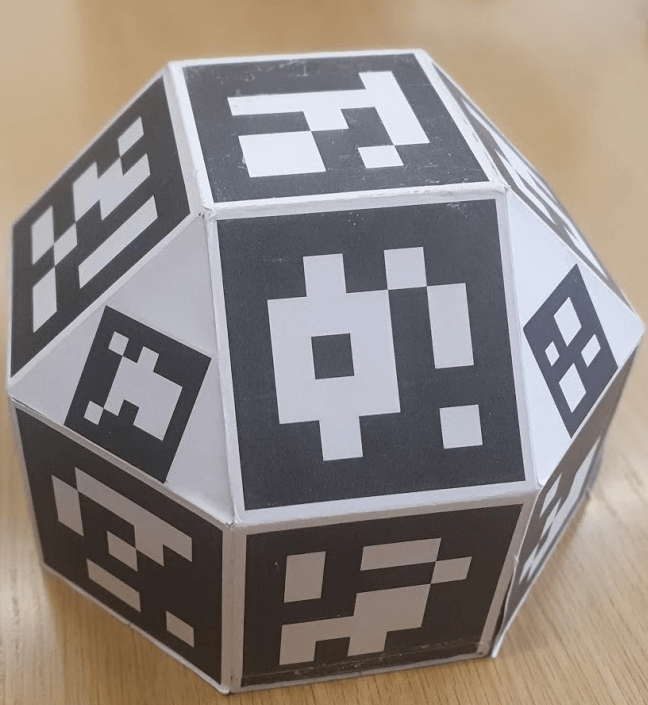
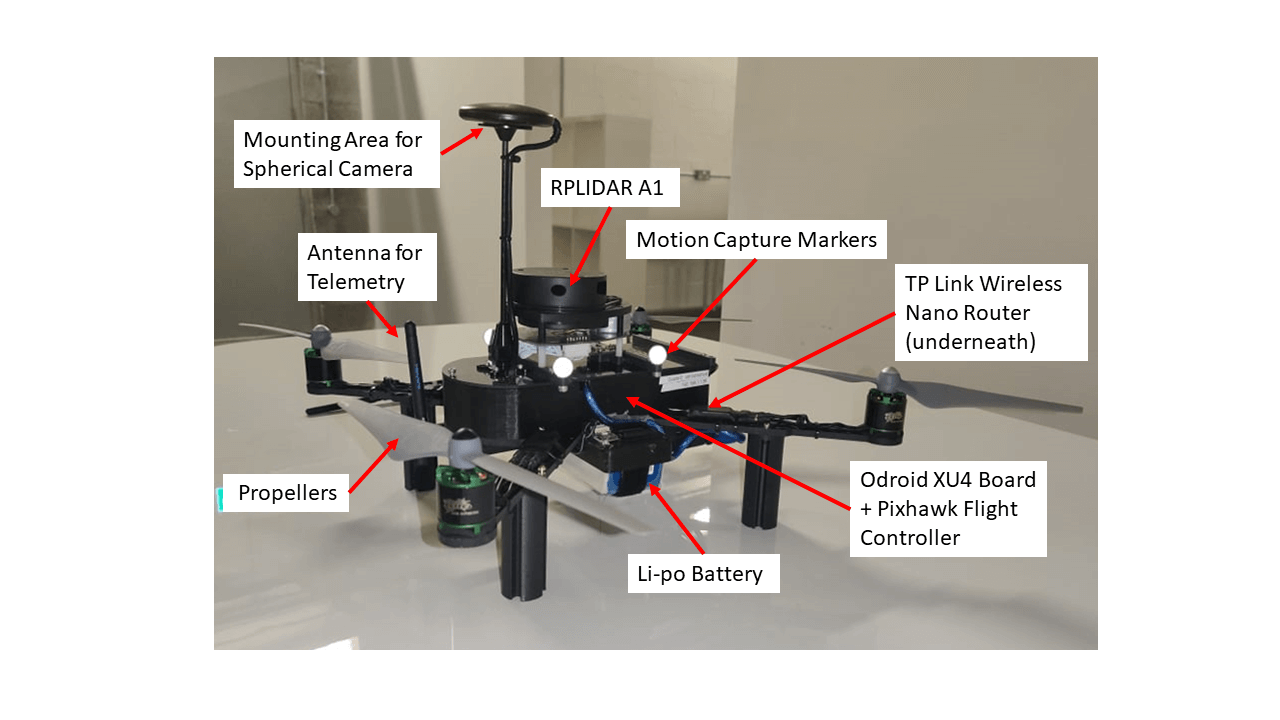
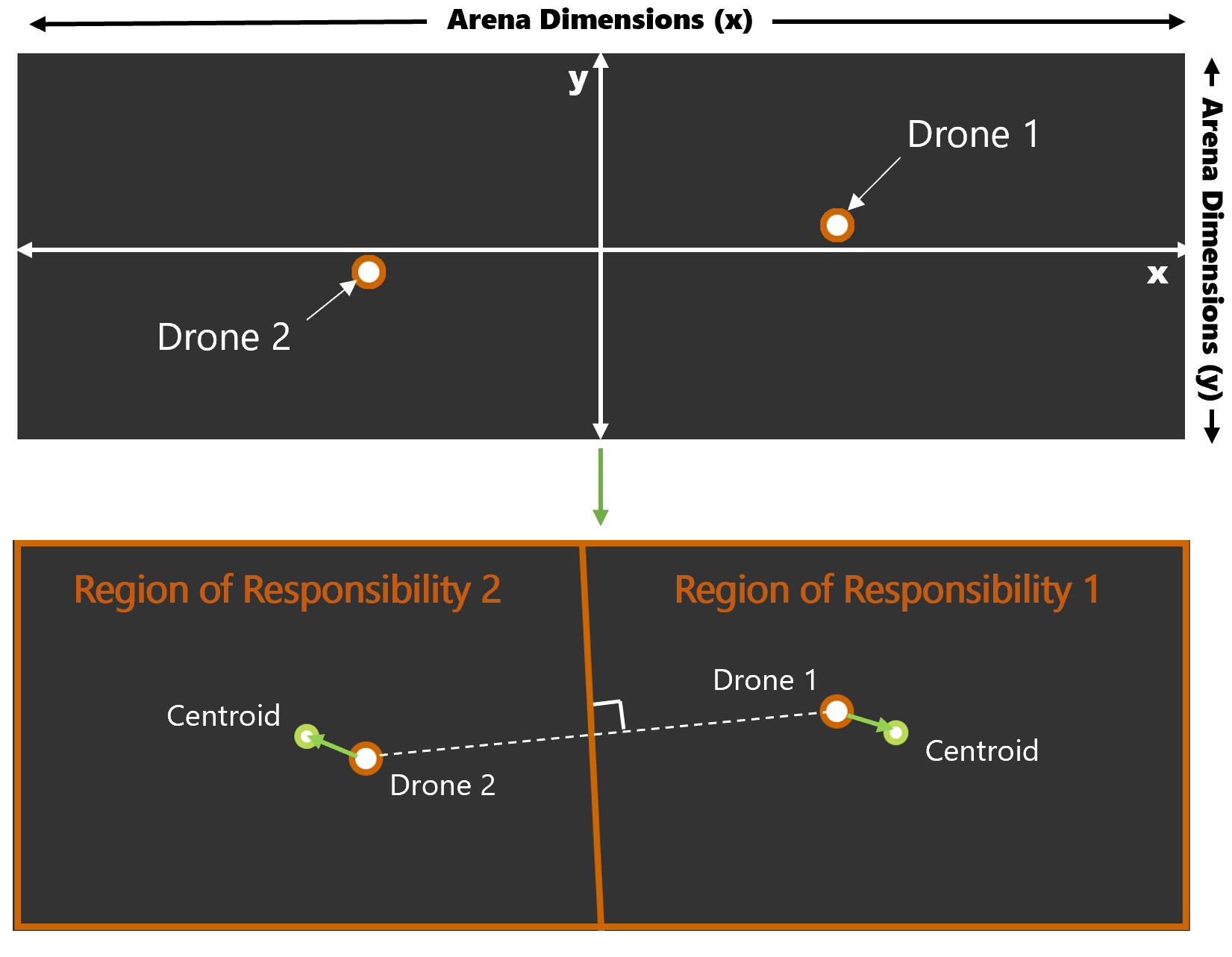
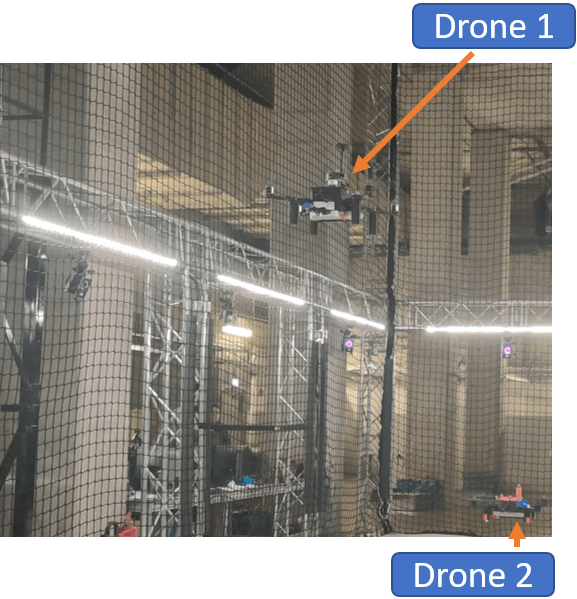
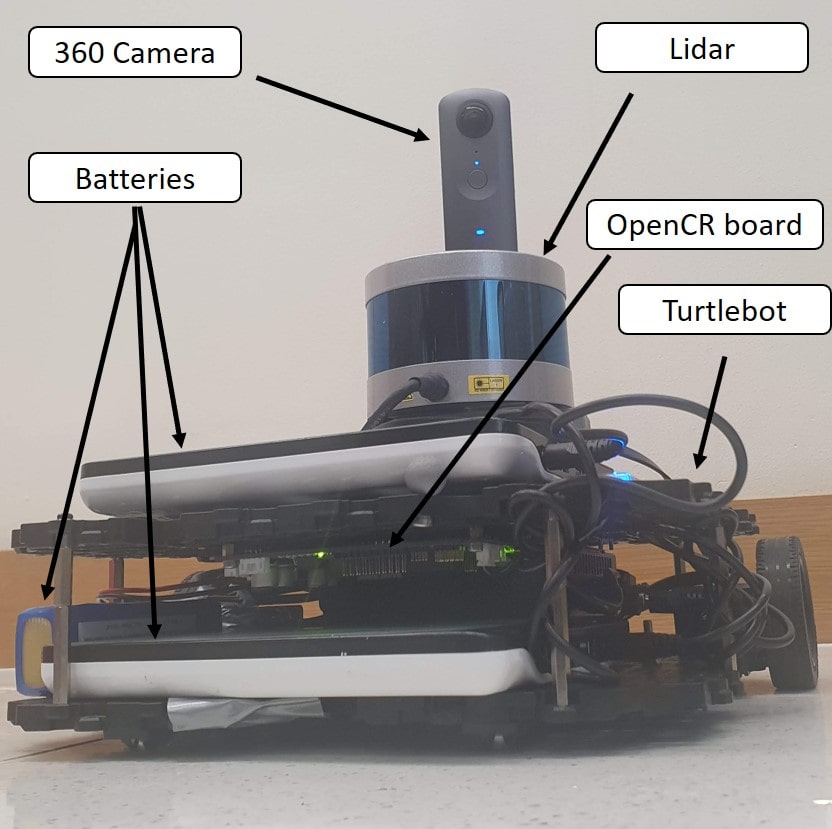
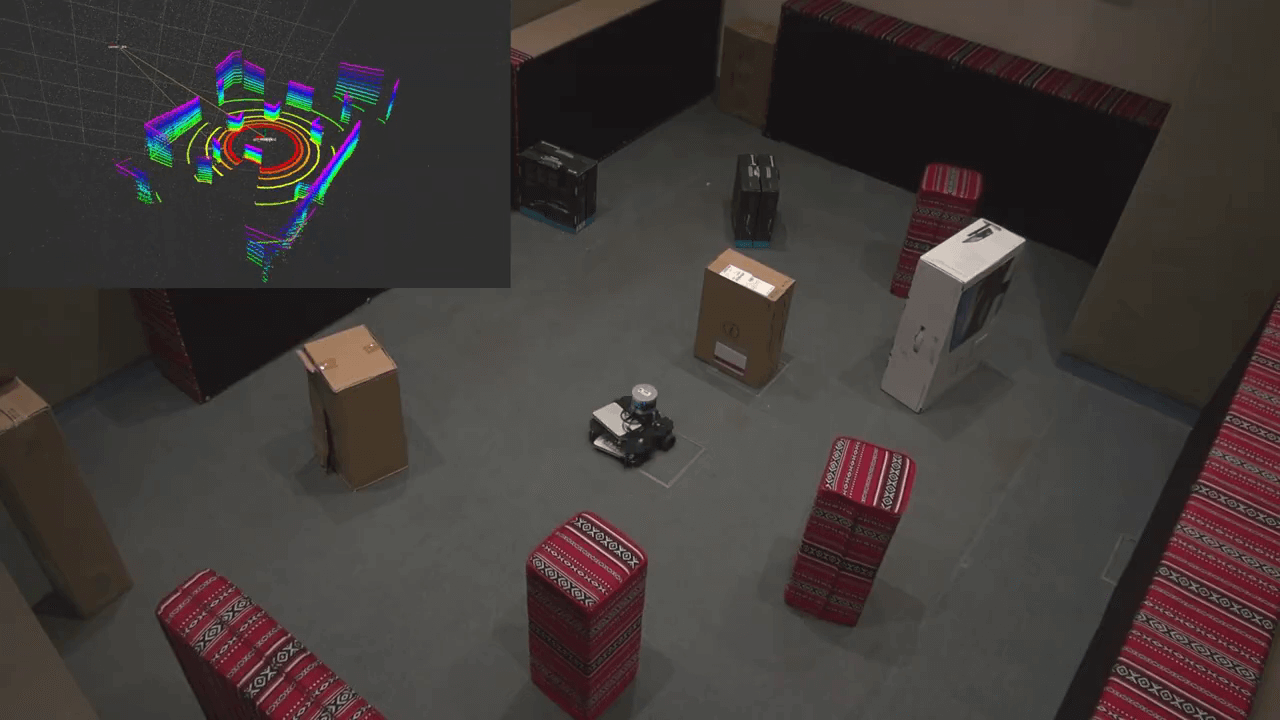
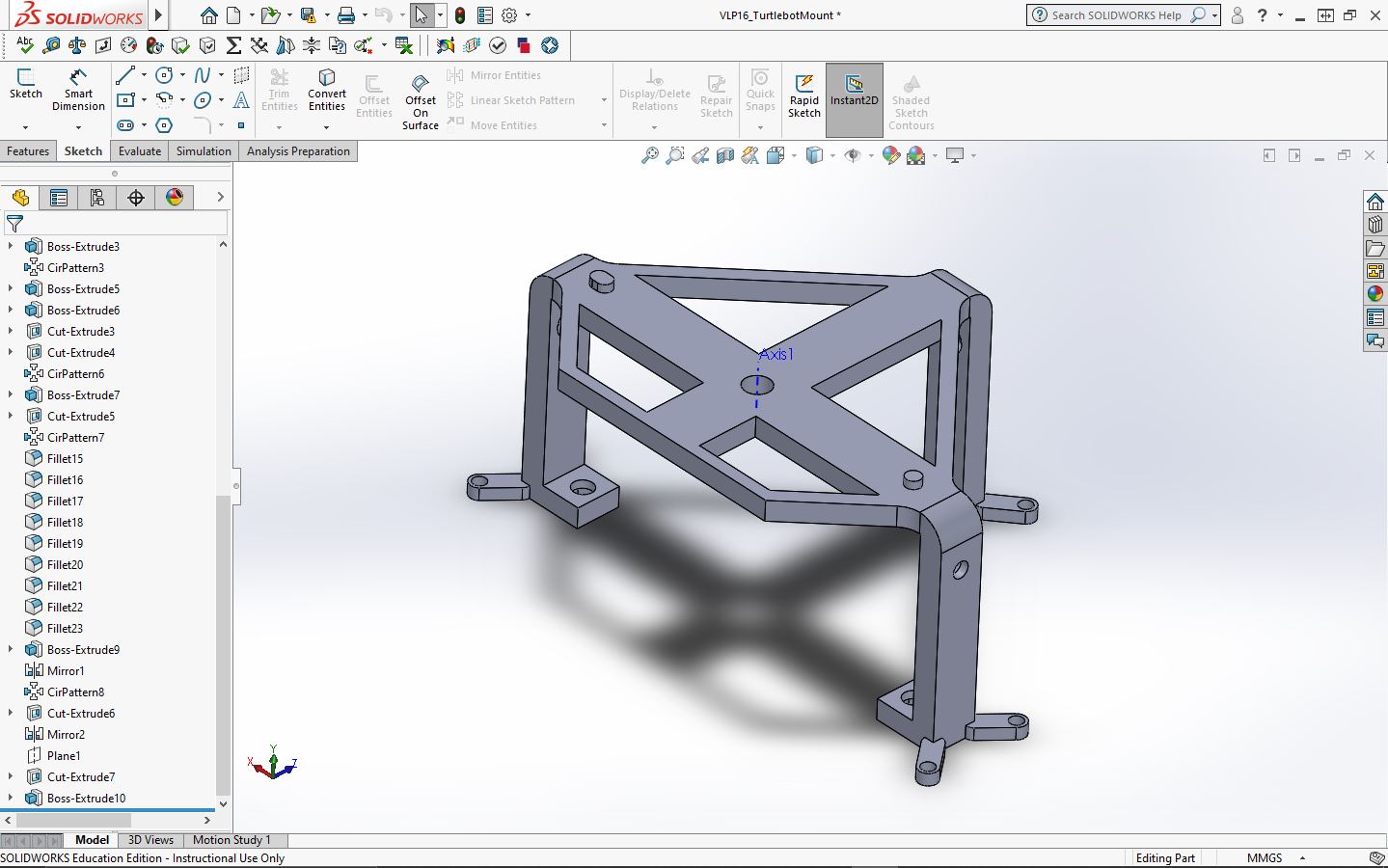
Several computer vision techniques employ fiducial markers with a recognizable pattern, in order to perform pose estimation between the camera and the attached markers in the collaborating drones. This concept is used for relative drone localization while each drone performs SLAM using using cameras, LiDAR and an IMU. In this project, a multi-sensor integration of a LiDAR sensor and a spherical-lens camera is used along with a wireless ad-hoc communication channel to assist in a collaborative control design for a drone swarm for visual aerial coverage purposes. Using simulations, a real-time Voronoi tessellation of the area in NYUAD’s Robotics lab for two of the designed drones flying at the same height is also derived and the area coverage is achieved by commanding each drone to move towards the centroid of its assigned Region of Responsibility.
Link to paper: Collaborative Control Design for a Drone Swarm
Link to poster: Collaborative Control Design for a Drone Swarm
My Work
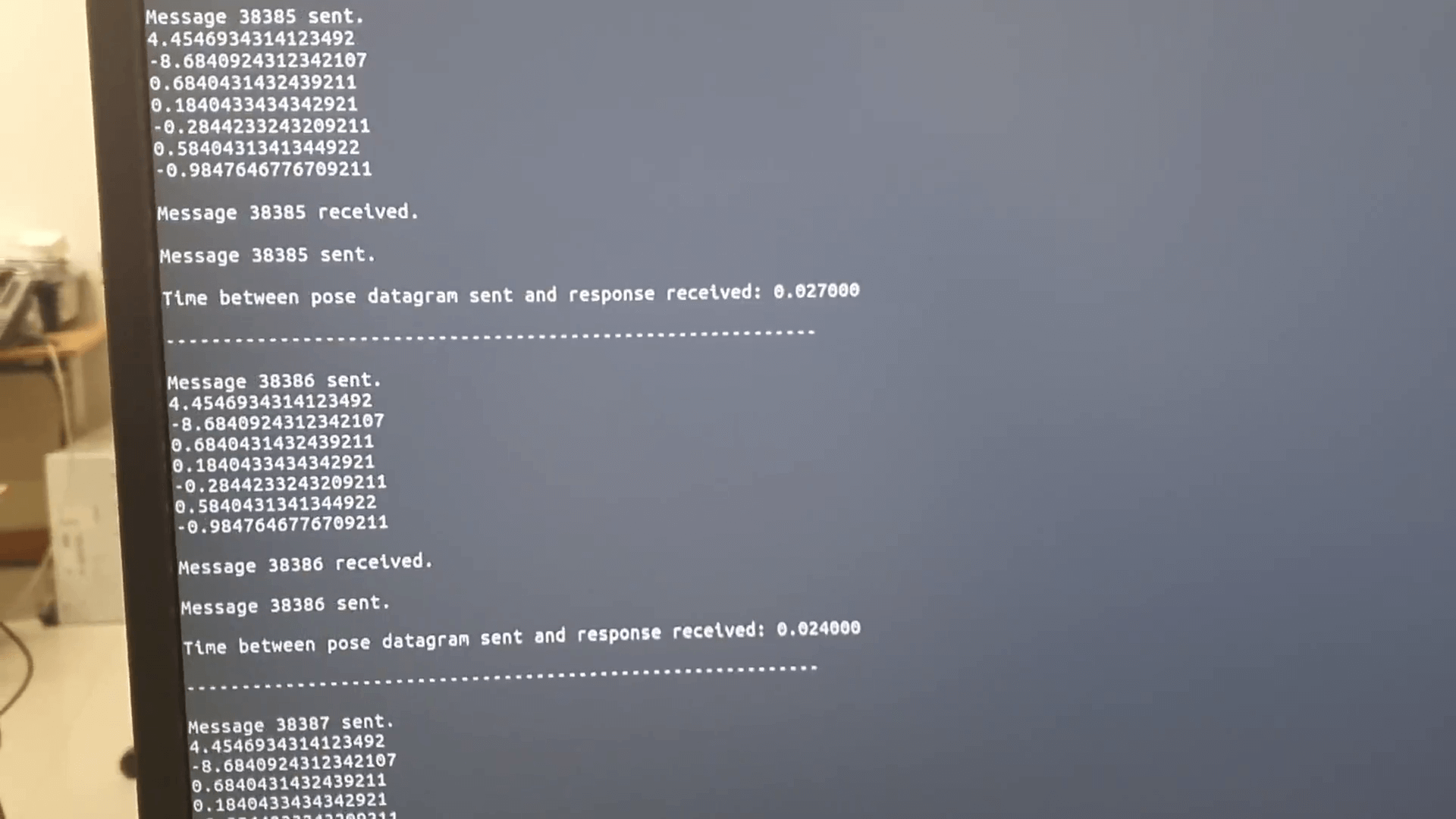
• Developed UDP/IP ad-hoc system for direct pose exchange between drones on dedicated omnidirectional wifi channel 6.
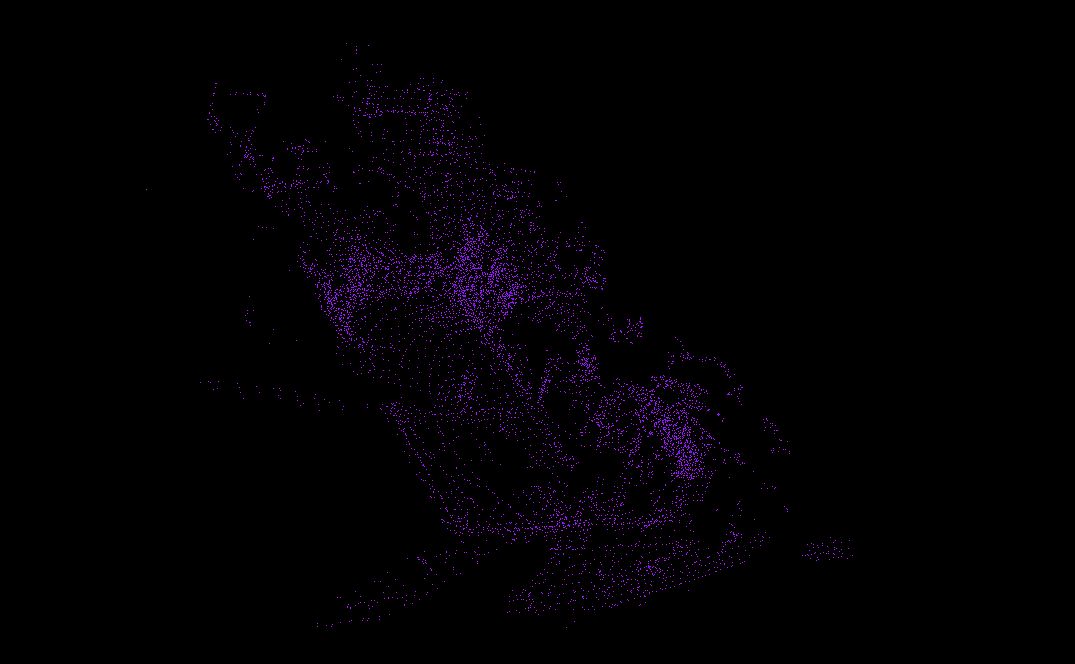
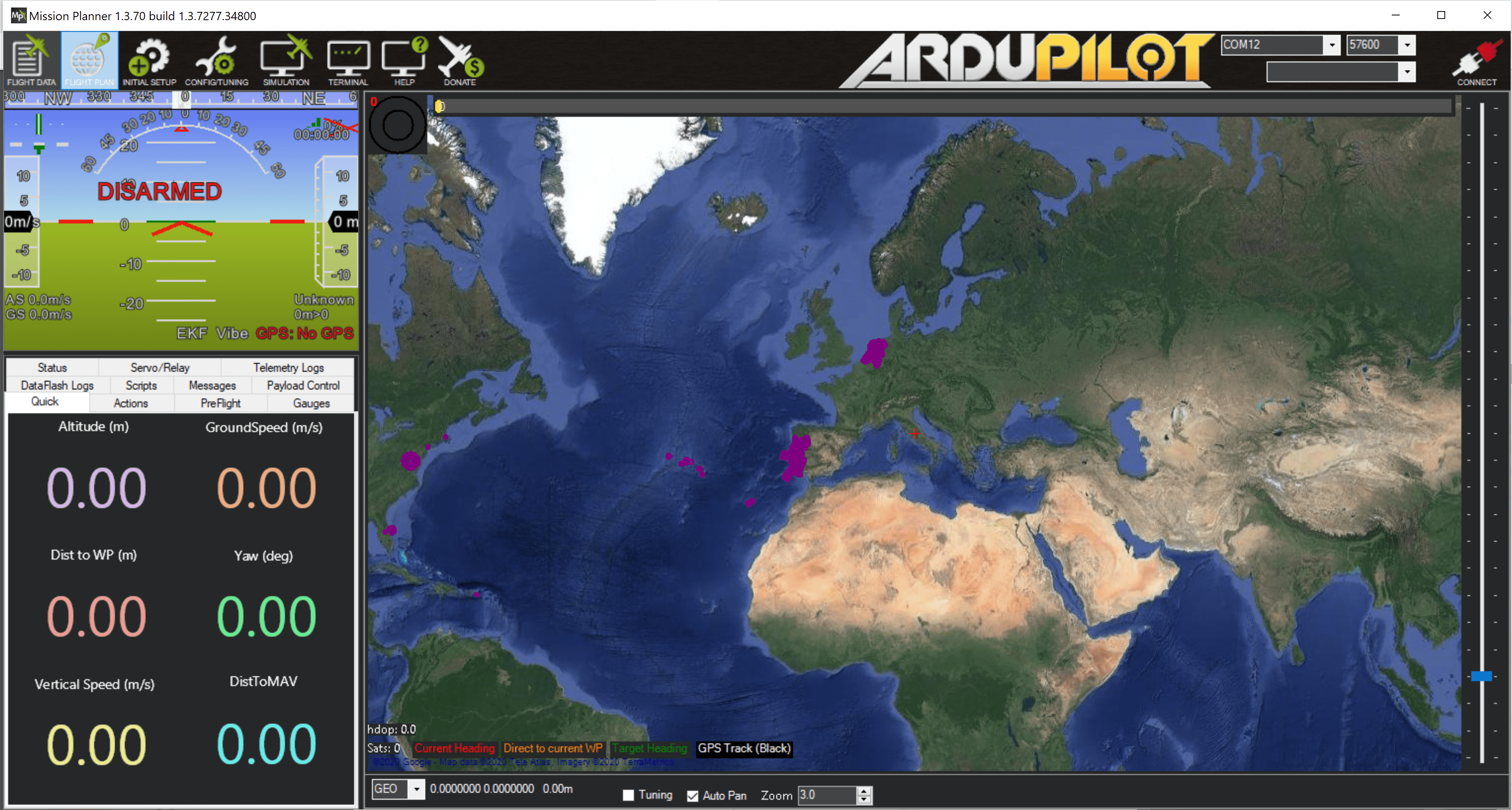
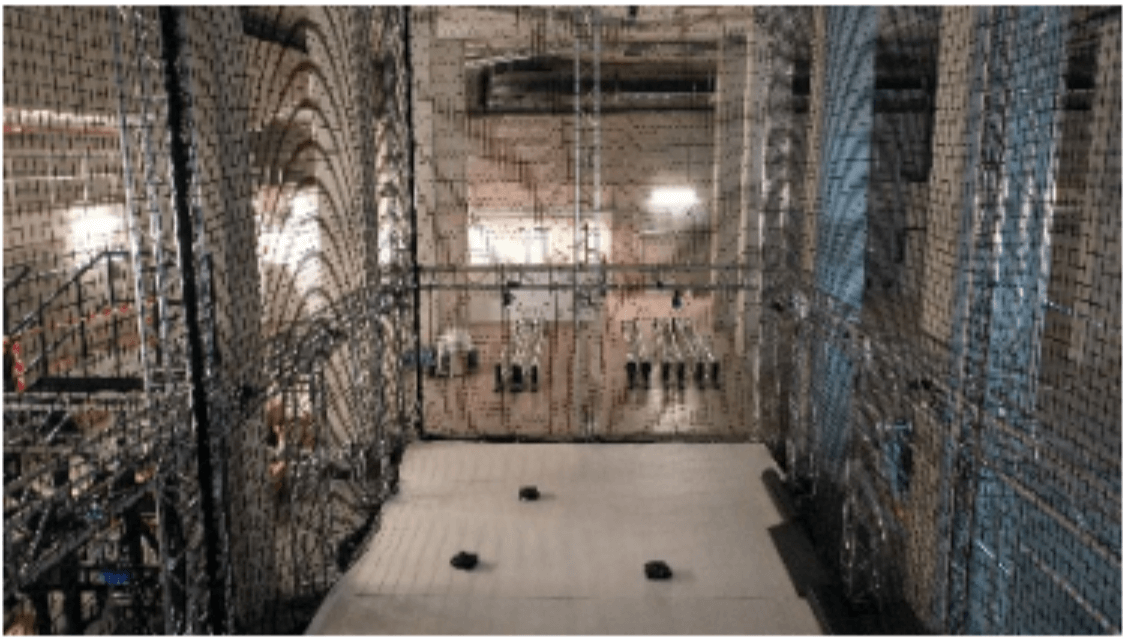
• Co-designed Simultaneous localization and mapping system that incorporated Hector SLAM and LOAM SLAM for mapping and localizing the drone in it's immediate environment.
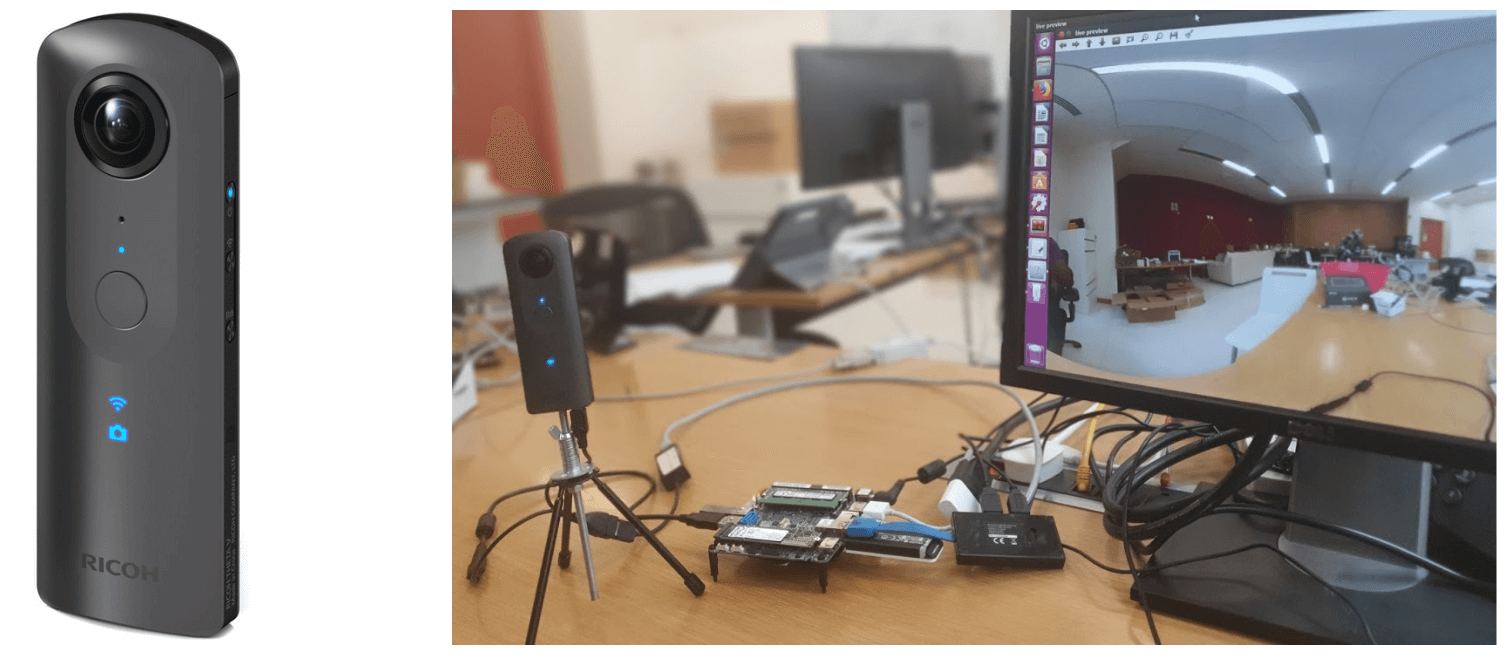
• Co-developed computer vision system for relative localization using fiducial markers and a spherical camera.
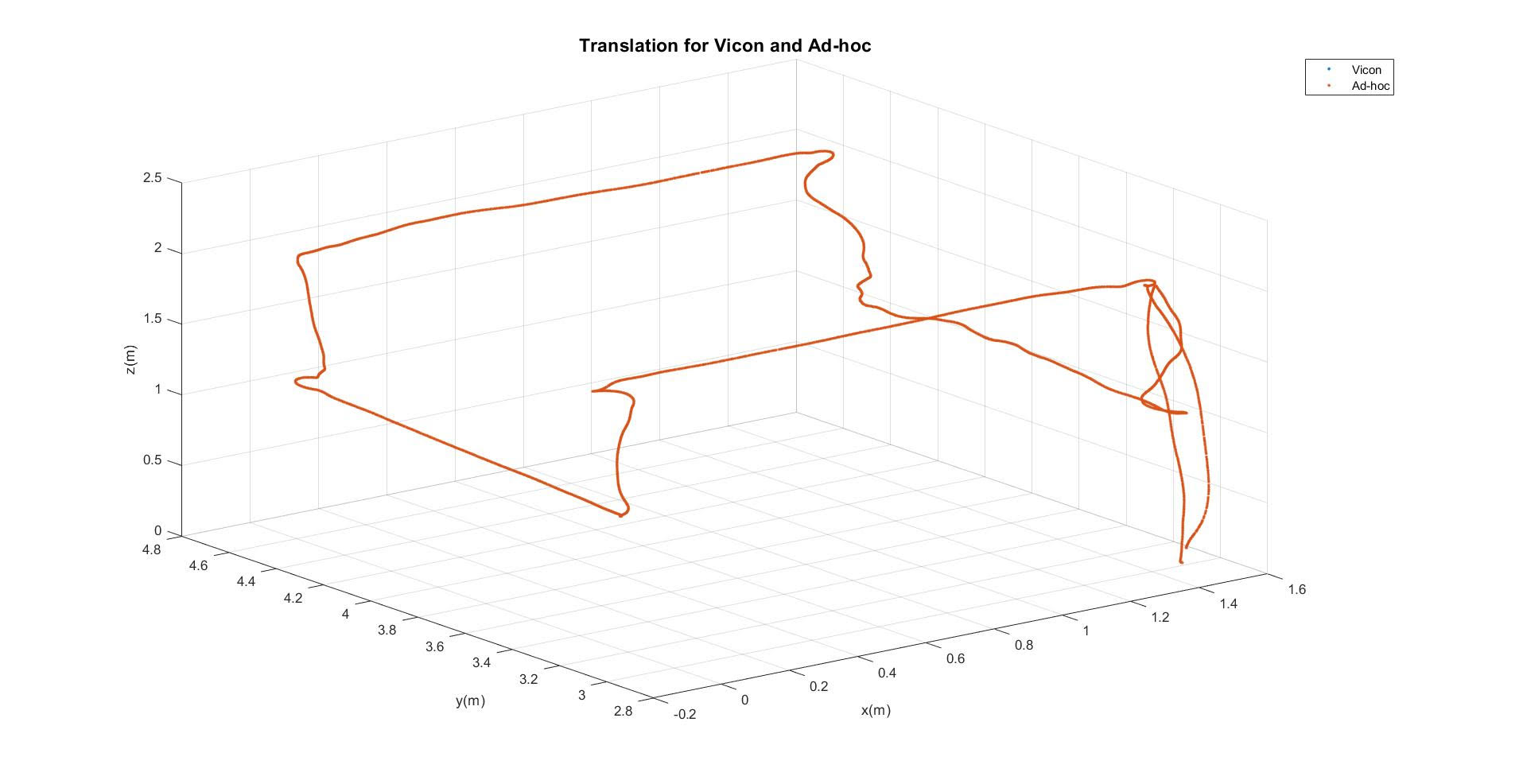
• Conducted experiments to validate the results from the multi-sensor fusion control system and ad-hoc pose exchange system using a Vicon system.
Media