Robotics Collaboration
Researcher - Robotics and Intelligent Systems Control. Abu Dhabi, UAE
Feb 2020 - Present
My Work
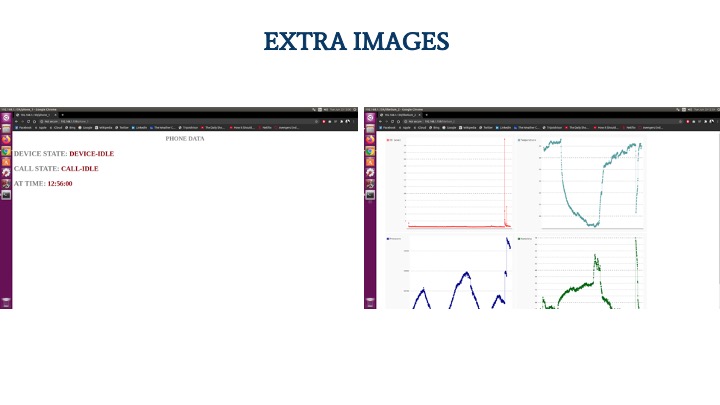
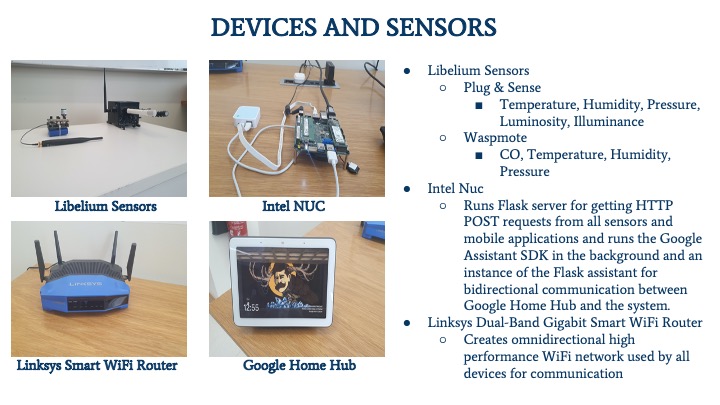
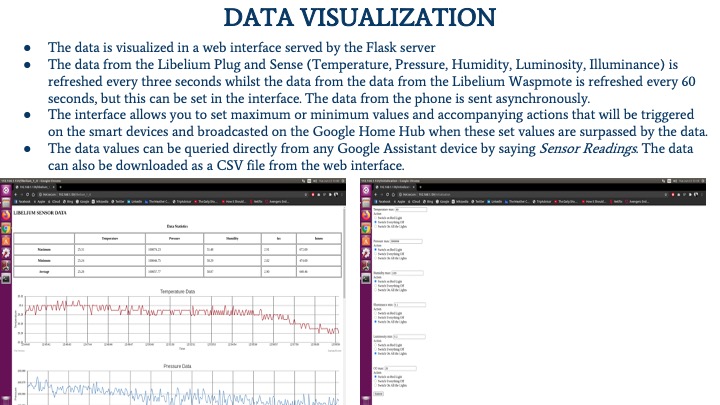
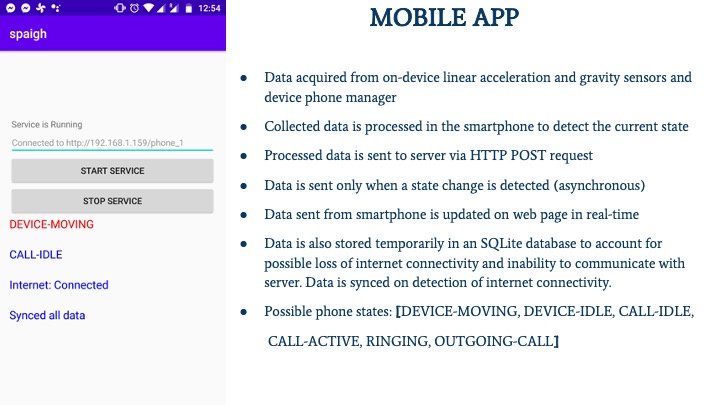
• Design and develop an IoT system that incorporates various sensors, actuators, communication protocols, and mobile and watch applications with Google Assistant for effective control and automation in calm computing applications.
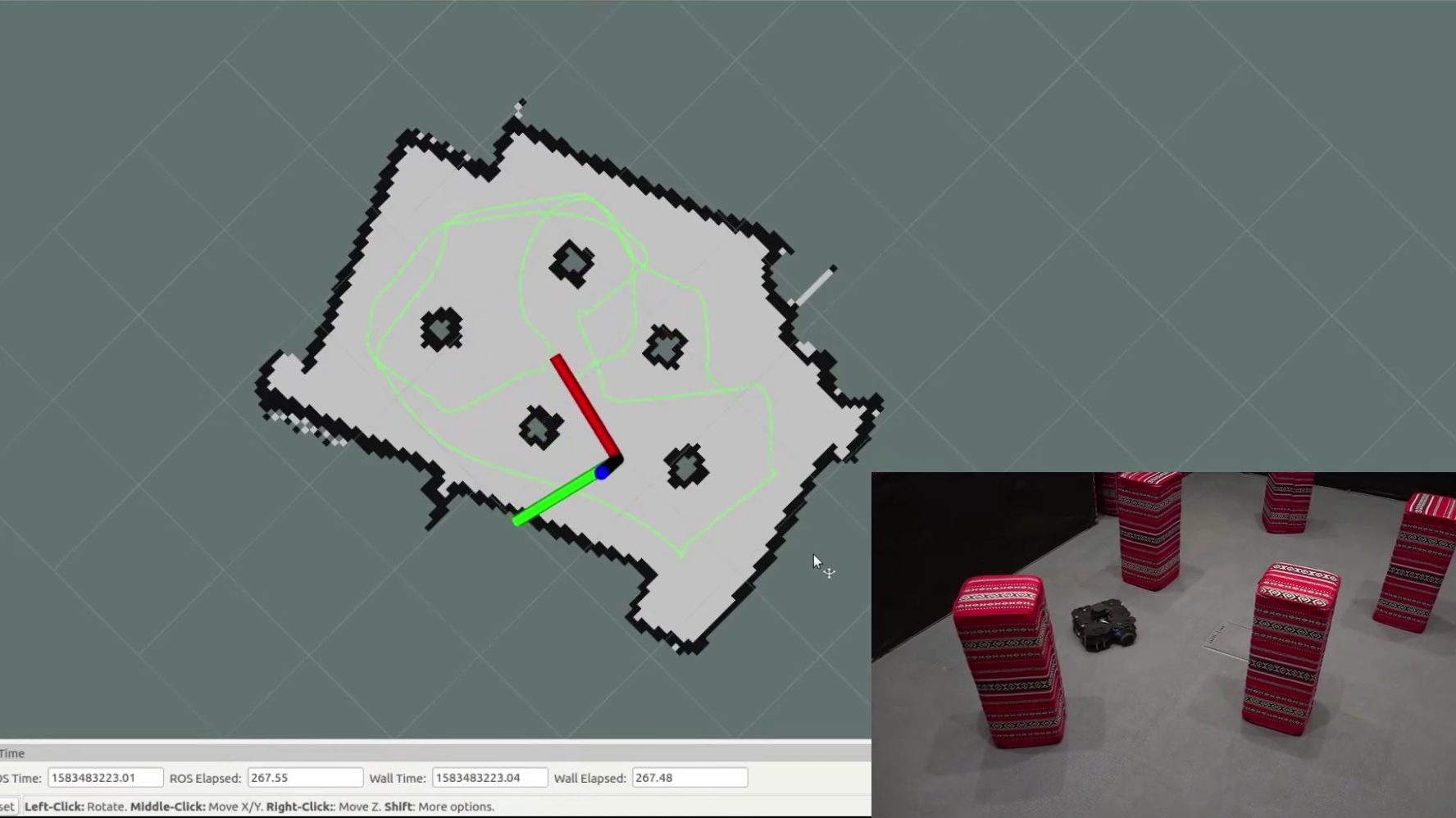
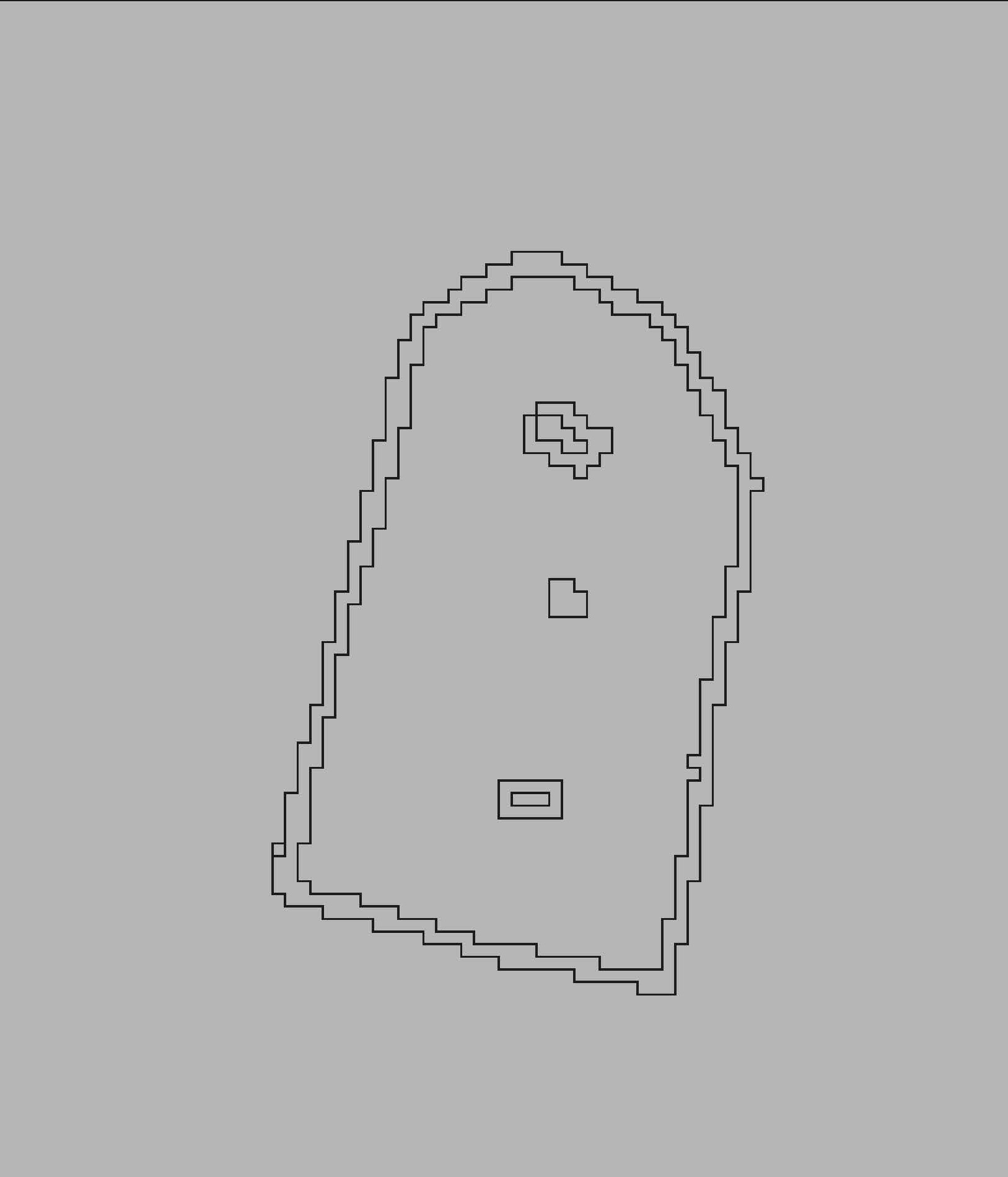
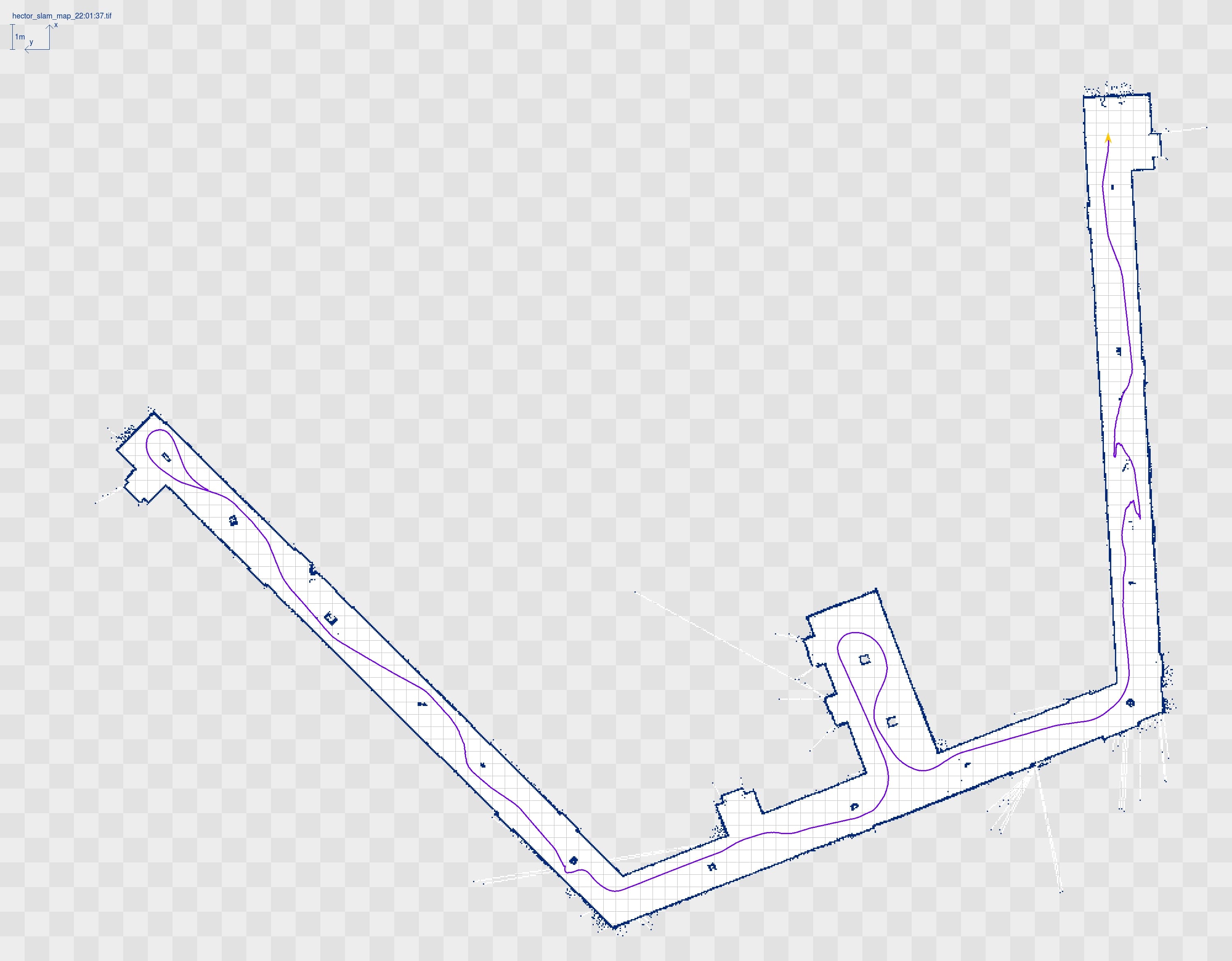
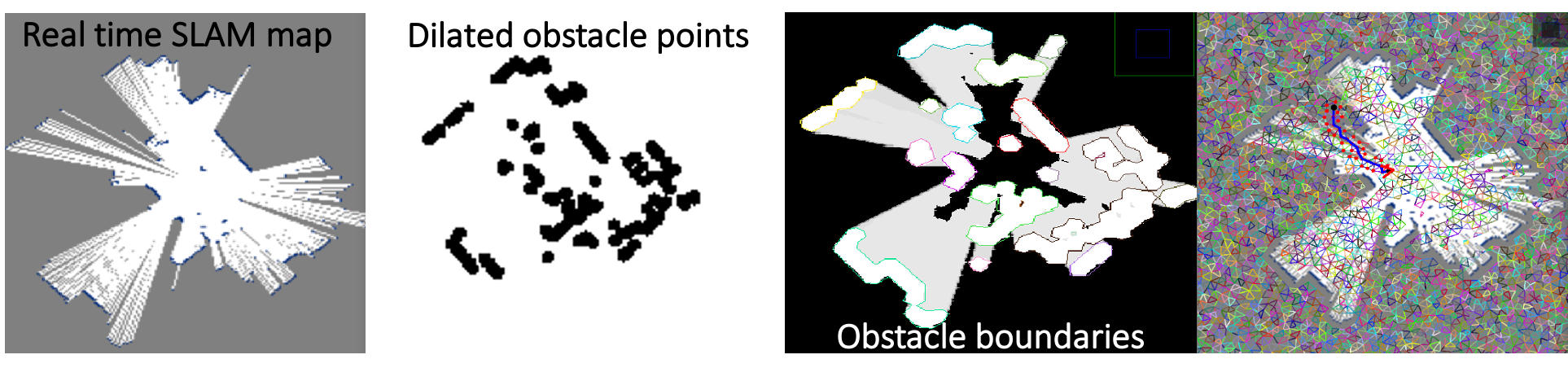
• Develop a calm computing system that uses Hector SLAM for real-time optimal geodesic trajectory planning with TurtleBot3 and RP Lidar in ROS (Python and C++).
• Design and conduct experiments to validate the results from the real-time optimal geodesic trajectory planning system and in-house smart calm computing environment.
• Collate results, perform analyses, and write and publish findings to MEEE 2022 and IEEE Transactions on Affective Computing.
Photos